📌 核心参数一览
📍 基本信息
- 型号:Nuwa-HP60C 深度相机(结构光 3D 相机)
- 技术类型:结构光 3D 成像技术,用于获取深度图像和 RGB 图像
- 典型应用:机器人导航与避障、深度建模、动作捕捉、手势交互等 3D 视觉任务
📷 光学与成像参数
| 参数 | 规格 |
|---|---|
| 深度图像分辨率 | 640 × 480 像素 @ 30 fps(深度输出) |
| 彩色图像分辨率 | 1920 × 1080 @ 30 fps(RGB 图像) |
| 深度视场(FOV) | 水平 73.8° × 垂直 58.8° × 对角 86.4° |
| 彩色视场(FOV) | 水平约 80.9° × 垂直 51.7° × 对角 88.9° |
| 测量范围 | 0.2 m ~ 4 m(有效深度检测距离) |
| 深度精度误差 | 产品说明中提及精度指标(说明书未公开详细数值) |
⚙️ 物理与接口
| 参数 | 说明 |
|---|---|
| 尺寸 | 约 89.8 mm × 19.0 mm × 25.0 mm(体积小巧,易集成) |
| 重量 | 未公开具体重量(一般几百克级别) |
| 接口 | USB Type-C(USB 2.0 数据与供电) |
| 功耗 | 小于 2 W(低功耗设计) |
| 标准输出 | UVC 类设备,可直接作为视频设备使用 |
🧠 特性与兼容性
- 3D 结构光深度成像:通过点阵投射和 IR 摄像头实现空间深度测量
- 内置高性能深度处理器:现场完成深度图计算,提高实时性能
- 支持 ROS1 / ROS2:便于机器人系统集成和开发(部分产品资料提及)
- 抗光照干扰能力:适应室内复杂光照(弱光/逆光等)
- 即插即用:标准 USB 接口与驱动支持
检查情况
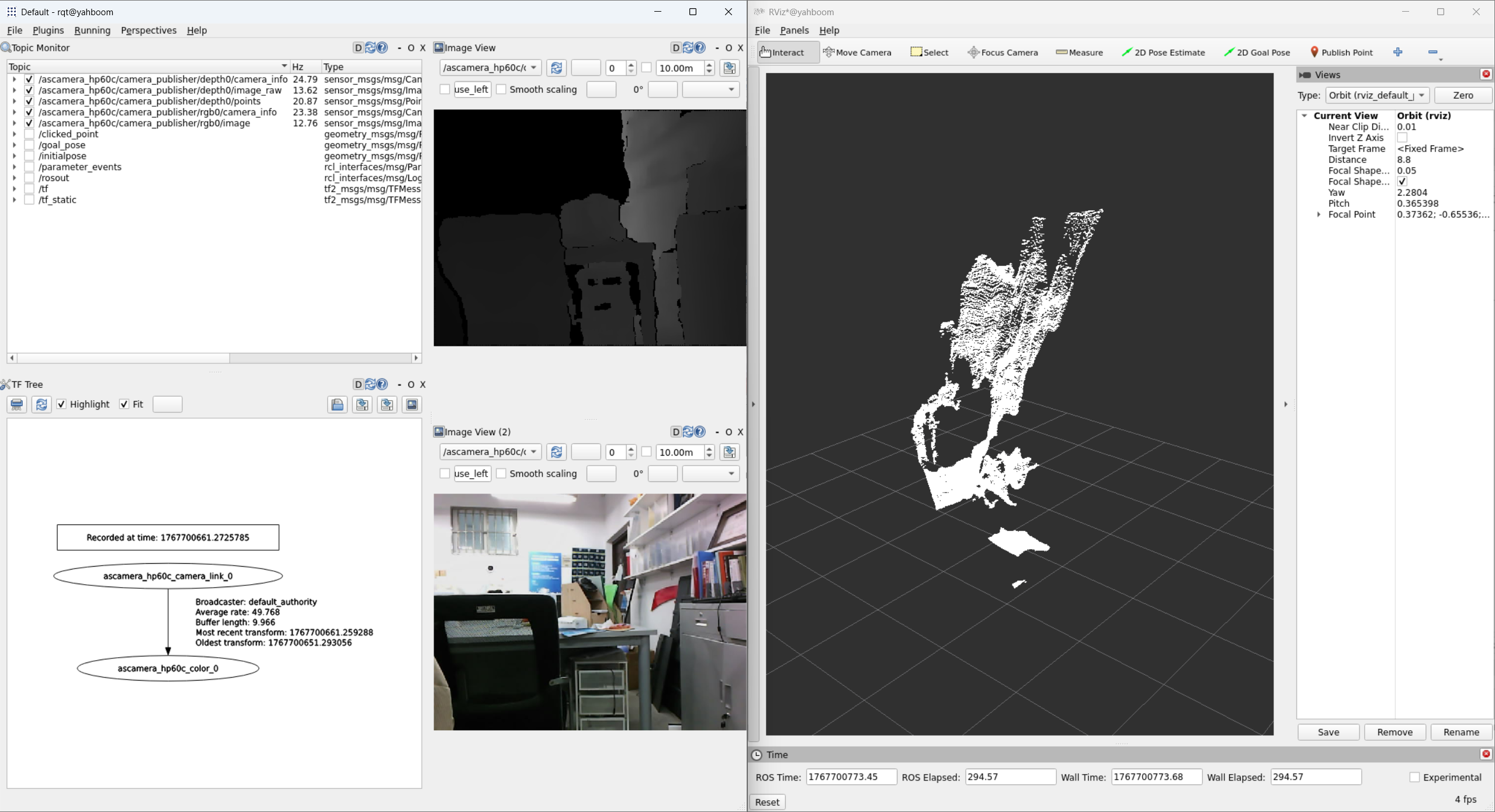
使用相机厂商提供的SDK,在设置640x480@30fps情况,实际话题频率为24Hz。
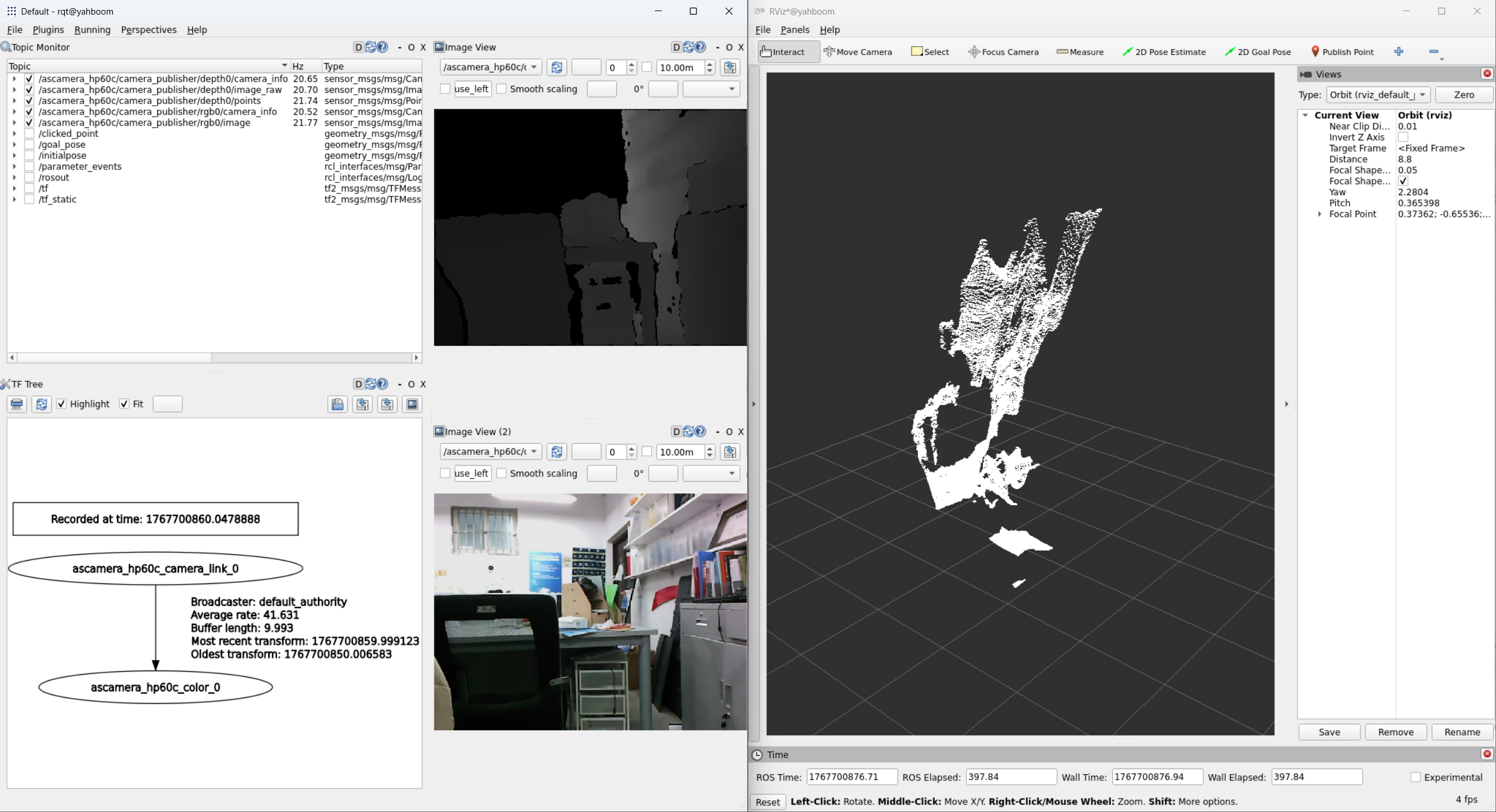
在设置640x480@25fps情况,实际话题频率为20Hz。
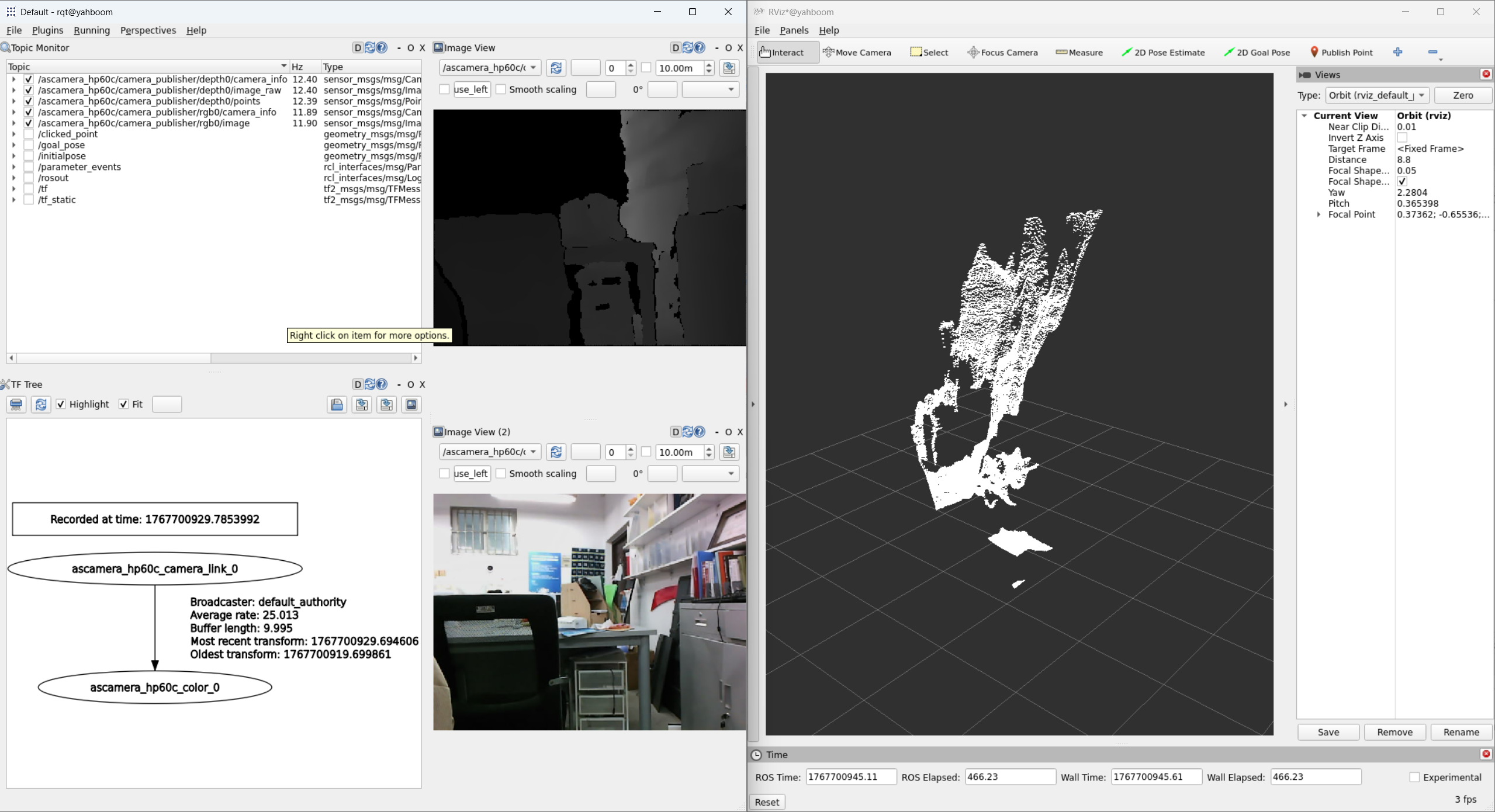
 在设置640x480@15fps情况,实际话题频率为12Hz。
在设置640x480@15fps情况,实际话题频率为12Hz。
注意:不支持640x480@20fps