📊 YDLIDAR T-mini Plus 参数汇总
🧠 核心性能参数
| 参数 | 规格 | 说明 |
|---|---|---|
| 测距频率 (Ranging Frequency) | 最大 4000 Hz | 测距点触发频率,可反映响应速度 |
| 扫描频率 (Scan Frequency) | 6 – 12 Hz | 整体一圈的扫描频率,可软件调节(出厂默认 6 Hz) |
| 测距距离 (Range) | 0.05 – 12 m @ 80% 反射率 | 在高反射物体上最远可达 ~12 m |
| 反射率 10% 时距离 | 最高约 4 m | 低反射物体上的典型测距距离 |
| 扫描视场 (FOV) | 360° | 全方位平面扫描 |
| 角度分辨率 (Angular Resolution) | 0.54° | 单点角度增量精度 |
| 系统误差 (Accuracy) | ±20 mm | 全量程精度 |
📦 外观与接口
| 参数 | 规格 |
|---|---|
| 体积尺寸 | 38.6 × 38.6 × 33.9 mm |
| 重量 | 约 45 g(不同渠道数据有略微出入) |
| 通信接口 | UART |
| 供电电压 | ~ 5 V (4.8 – 5.2 V) |
| 功耗/典型电流 | ~300 mA 工作 |
🌡️ 环境与安全
| 参数 | 说明 |
|---|---|
| 环境干扰能力 | 可抵抗高达 60 kLux 环境光干扰 |
| 温度补偿 | 内置温度补偿算法 |
| 激光安全等级 | Class I / IEC60825-1 |
| 工作温度范围 | 约 -10 °C ~ 45 °C(开发板典型) |
🛠️ 软件与开发支持
- 提供 SDK 支持:Windows、Linux
- 支持 ROS / ROS2 系统集成
- 配套技术文档和开发示例
简单检查与测试
第一步,安装CP210x驱动
TMINI雷达可通过转接板连接电脑USB串口,需安装驱动程序使得计算机正确识别设备。双击安装即可。
第二步,使用EaiLidarTest对雷达进行检查
1)打开计算机管理,确认雷达串口所在的串口号(如COM7)
2)打开EaiLidarTest,在SystemConfig中设置雷达参数信息
3)点击Start,查看雷达点云结果
检查情况
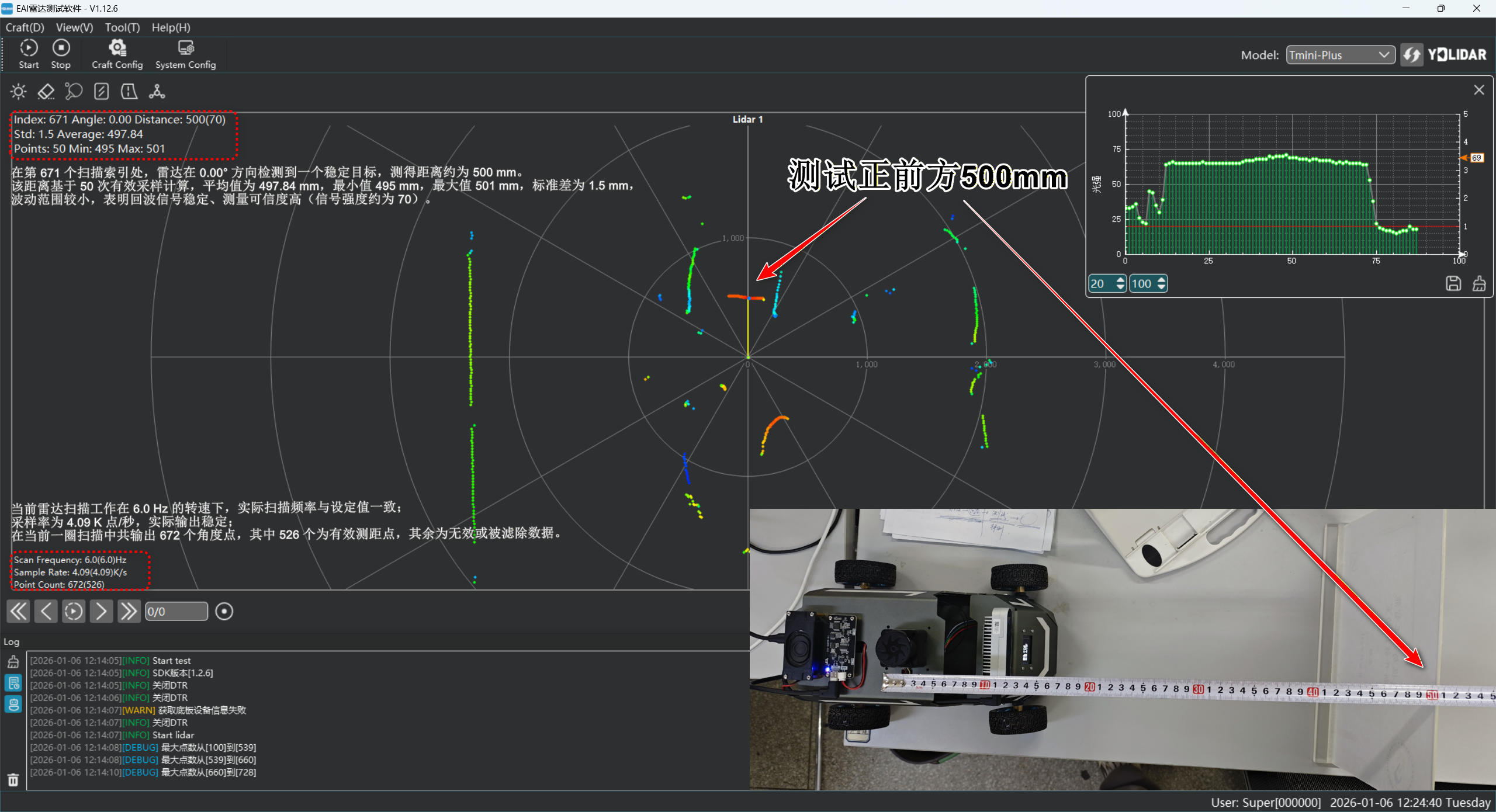
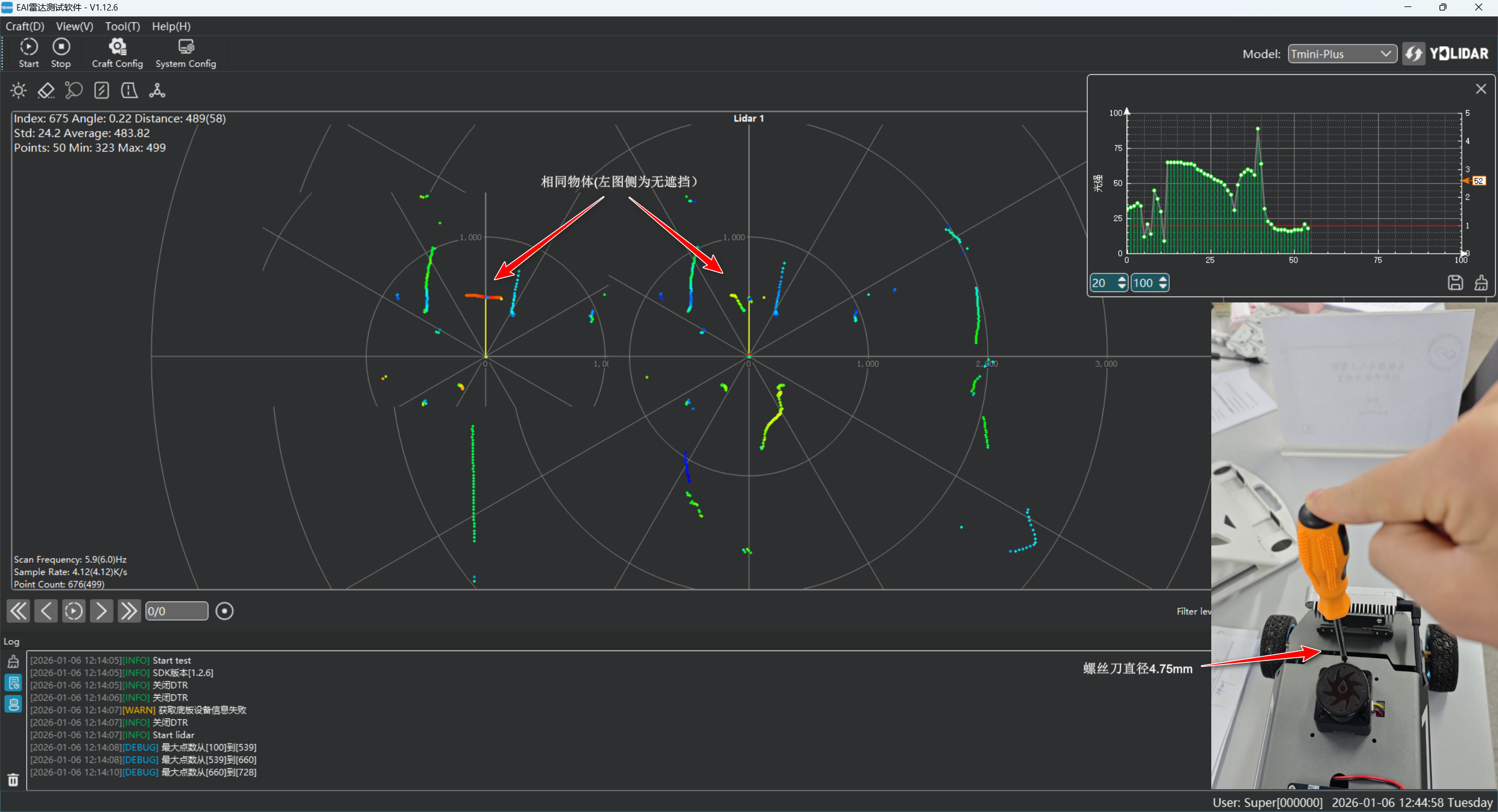
测试
在雷达前方约 30 mm 处放置直径约 4.75 mm 的细小遮挡物(螺丝刀),在第 675 个扫描索引、0.22° 方向检测到回波信号,输出距离约为 489 mm。该测量基于 50 次采样计算,平均距离为 483.82 mm,最小值 323 mm,最大值 499 mm,标准差为 24.2 mm,数据波动显著,回波稳定性明显下降,信号强度约为 58,表明细小目标对激光束产生了部分遮挡与散射影响。
机械臂安装
现有方案:
-
在雷达的周围设置立柱,将机械臂安装在雷达上侧,不影响全向扫描,但立柱稍有影响
-
将机械臂安装在雷达后侧,雷达仅后侧扫描受阻,前向及侧向不受阻
在 SLAM + 导航 + 避障系统中,方案 ②(机械臂安装在雷达后侧,形成固定后向盲区)通常优于方案 ①(全向但存在多处局部遮挡)。
SLAM 更怕“全向随机噪声”,而不怕“固定、可建模的盲区”。
在 SLAM 与导航系统中,优先选择传感器遮挡区域稳定、连续且可建模的方案。相比在雷达周围设置立柱造成多角度随机干扰,将机械臂布置在雷达后侧形成固定盲区,更有利于点云预处理与建图稳定性,同时对前向避障能力影响较小。
雷达与机械臂安装方案对比(SLAM / 导航视角)
| 维度 | 方案 ①:雷达周围立柱 + 机械臂在上方 | 方案 ②:机械臂在雷达后侧(固定遮挡) |
|---|---|---|
| 雷达视场 | 理论 360° 全向可见 | 后向存在固定盲区,前向与侧向完整 |
| 遮挡特性 | 多个立柱造成多角度、离散遮挡 | 单一方向形成连续、稳定遮挡角度段 |
| 遮挡稳定性 | 受安装误差、振动影响,点位存在微漂移 | 遮挡角度固定,可视为静态结构 |
| 点云表现 | 多角度出现近距离干扰点 | 后向点云缺失或可控 |
| 点云噪声类型 | 环状噪声、毛刺、虚假近墙 | 明确的角度缺失,不产生随机噪声 |
| 滤波难度 | 高:难以用单一 angle mask 或 distance threshold 完全剔除 | 低:可通过角度屏蔽一次性处理 |
| SLAM 建图影响 | 易造成地图污染、局部结构扭曲 | 对建图影响可控,长期稳定 |
| SLAM 定位稳定性 | 定位匹配易受干扰,存在漂移风险 | 匹配结构清晰,定位鲁棒性高 |
| 前向避障能力 | 理论完整,但存在误检风险 | 完整保留,符合导航核心需求 |
| 后向感知需求 | 完整但价值有限 | 降级处理即可满足需求 |
| 工程可控性 | 低,调参与维护成本高 | 高,遮挡可建模、可配置 |
| 整体 SLAM 友好度 | ❌ 不推荐 | ✅ 推荐 |
方案 ② 在避障场景下的能力评估
| 感知方向 | 避障重要性 | 雷达可用性 | 对避障功能的影响 | 工程评价 |
|---|---|---|---|---|
| 前方 | ⭐⭐⭐⭐⭐(最高) | 完整 | 前向障碍物可被完整、稳定感知 | ✅ 满足核心避障需求 |
| 侧方 | ⭐⭐⭐⭐ | 完整 | 转向、贴边、侧向避障不受影响 | ✅ 对导航友好 |
| 后方 | ⭐⭐ | 受遮挡(固定盲区) | 后退或低速运动时可通过策略补偿 | ⚠️ 可接受、可降级 |
| 紧急避障 | ⭐⭐⭐⭐⭐ | 完整(主要依赖前向) | 紧急制动与避让能力不受影响 | ✅ 安全性不受影响 |